

Manipulator mit Greifvorrichtung für unterschiedliche Bauteile

Manipulator mit Greifvorrichtung für unterschiedliche Bauteile

Manipulator mit Saugvorrichtung für unterschiedliche Bauteile
Manipulator mit Greifvorrichtung für unterschiedliche Bauteile
GELENKARM SYSTEM
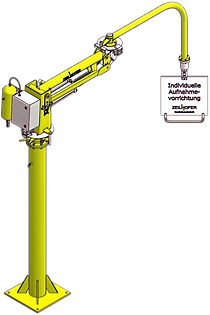
GELENK-MANIPULATOR
Der Gelenkarm-Manipulator von Zeilhofer Handhabungstechnik ist eine Hebehilfe für die pendelfreie Handhabung von Lasten bis 800 kg bei einem Arbeitsradius bis 4,5 Metern. Er ist in vier Montagevarianten verfügbar: stationär oder verfahrbar, jeweils am Boden oder an der Decke. Alle Varianten tragen bis 800 kg, sie unterscheiden sich in der Auslegerlänge. Die starre Lastführung verhindert ein Schwingen der Last und ermöglicht millimetergenaue Positionierung.
Für jede Anwendung wird der Gelenkarm-Manipulator mit einer individuell entwickelten Vorrichtung ausgestattet.
Zeilhofer liefert die komplette Lösung aus einer Hand, von der Planung über Steuerung und Vorrichtung bis zum Aftersales-Service. Hergestellt wird der Manipulator am Standort Holzkirchen in Deutschland.
MONTAGEVARIANTEN
VIER VARIANTEN. IMMER STARRE LASTFÜHRUNG
Der Gelenkarm-Manipulator passt sich Ihrer Halle an — nicht umgekehrt. Wählen Sie die passende Konfiguration für Ihren Produktionsbereich.
01 STATIONÄR AM BODEN - Feste Arbeitsstation mit maximaler Stabilität
Der Manipulator wird fest am Hallenboden verankert. Ideal für definierte Arbeitsstationen mit großem Aktionsradius. Besonders wirtschaftlich bei konstantem Einsatzort (optional verfahrbar per Gabelstapler oder Hubwagen).
IHRE VORTEILE
-
Feste Arbeitsstation mit maximaler Stabilität
-
Einfache und schnelle Montage
-
Starre Lastführung
-
Großer Arbeitsradius bis 4.500 mm
-
Tragfähigkeit bis zu 800 kg
-
Leichtlauf-Hubzylinder aus Aluminium
-
Drehlager mit 360° Endlosdrehdurchführung
-
Drehanschläge bzw. Begrenzung des Arbeitsbereichs
-
Bremse an den einzelnen Drehachsen
-
unterschiedliche Steuerungsvarianten (pneumatisch, elektro-pneumatisch)
02 VERFAHRBAR AM BODEN - Mobil per Stapler oder Hubwagen, ohne Deckeneingriff
Bei dieser Variante ist der Gelenkarm‑Manipulator auf einer stabilen Grundplatte montiert. Die komplette Einheit ist mobil und kann flexibel per Gabelhubwagen, elektrischer Ameise oder Gabelstapler zum Einsatzort transportiert werden.
IHRE VORTEILE
-
Die mobile Lösung ermöglicht eine optimale Ausnutzung vorhandener Flächen.
-
Verfahrbar mit Gabelhubwagen / Stapler
-
Starre Lastführung
-
Großer Arbeitsradius bis 4.500 mm
-
Tragfähigkeit bis zu 800 kg
-
Leichtlauf-Hubzylinder aus Aluminium
-
Drehlager mit 360° Endlosdrehdurchführung
-
Drehanschläge bzw. Begrenzung des Arbeitsbereichs
-
Bremse an den einzelnen Drehachsen
-
unterschiedliche Steuerungsvarianten (pneumatisch, elektro-pneumatisch)

03 STATIONÄR AN DER DECKE & STAHLBAU- Boden bleibt frei, platzsparendste Lösung
Der Manipulator wird fest an der Hallendecke oder an einem Stahlbau verankert. Die platzsparendste Lösung für beengte Produktionsbereiche, denn der Boden bleibt komplett frei für Stapler, Fahrzeuge und Mitarbeiter.
IHRE VORTEILE
-
Besonders platzsparende Lösung
-
Freier Hallenboden für den Betrieb
-
Starre Lastführung
-
Großer Arbeitsradius bis 4.500 mm
-
Tragfähigkeit bis zu 800 kg
-
Leichtlauf-Hubzylinder aus Aluminium
-
Drehlager mit 360° Endlosdrehdurchführung
-
Drehanschläge bzw. Begrenzung des Arbeitsbereichs
-
Bremse an den einzelnen Drehachsen
-
unterschiedliche Steuerungsvarianten (pneumatisch, elektro-pneumatisch)

04 VERFAHRBAR AN DER DECKE & STAHLBAU - Größter Aktionsbereich
Der Manipulator ist an einem Schienensystem befestigt und kann in X- und Y-Richtung durch die gesamte Produktionshalle verfahren. Maximale Flexibilität für wechselnde Arbeitsplätze und große Hallenbereiche.
IHRE VORTEILE
-
Größter Arbeitsbereich — gesamte Halle nutzbar
-
Variabel für wechselnde Stationen einsetzbar
-
Starre Lastführung
-
Großer Arbeitsradius bis 4.500 mm
-
Tragfähigkeit bis zu 800 kg
-
Leichtlauf-Hubzylinder aus Aluminium
-
Drehlager mit 360° Endlosdrehdurchführung
-
Drehanschläge bzw. Begrenzung des Arbeitsbereichs
-
Bremse an den einzelnen Drehachsen
-
unterschiedliche Steuerungsvarianten (pneumatisch, elektro-pneumatisch)

IN AKTION
DER GELENK-MANIPULATOR IM EINSATZ
Sehen Sie den Gelenk-Manipulator live in der Produktion, wie er schwere Lasten mühelos bewegt.
KOMPLETTLÖSUNG
MEHR ALS EIN PRODUKT- EINE VOLLSTÄNDIGE ANLAGE
Jedes Zeilhofer-System ist Teil einer Gesamtlösung. Entdecken Sie passende Vorrichtungen, Steuerungsoptionen und Branchenanwendungen.

END-OF-ARM TOOLING
VORRICHTUNG
Greifer, Sauger, Magnete, Haken, Schrauber und Sonderlösungen, individuell entwickelt für Ihr Bauteil. CE-konform aus einer Hand.

ANTRIEBS- & STEUERUNGSKONZEPT
STEUERUNG
Pneumatisch, elektropneumatisch oder elektrisch, mit Balancier-, Sicherheits- oder Automatiksteuerung. Exakt auf Ihren Prozess abgestimmt.

BRANCHENSPEZIFISCH
ANWENDUNGEN
Automotive, Gießerei, Glas & Fenster, Logistik, Maschinenbau und über 10 weitere Branchen. Sehen Sie, wie andere Unternehmen profitieren.
FAQ / Q&A
HÄUFIGE FRAGEN ZUM GELENK-MANIPULATOR
01 Welche Tragfähigkeit hat der Gelenkarm-Manipulator?
Der Gelenkarm-Manipulator ZH ist für Lasten bis 800 kg ausgelegt. Dieser Wert gilt für alle vier Montagevarianten. Die nutzbare Tragkraft hängt von der gewählten Auslegerlänge ab: Je größer der Arbeitsradius, desto stärker wirkt der Hebelarm. Bei der Auslegung stimmen wir Tragkraft und Reichweite gemeinsam mit Ihnen auf die Anwendung ab.
02 Wie groß ist der Arbeitsradius?
Der Gelenkarm-Manipulator erreicht einen Arbeitsradius von bis zu 4,5 Metern, abhängig von der gewählten Auslegerlänge. Damit werden große Arbeitsbereiche abgedeckt, ideal für Montagelinien und Stationen, an denen mehrere Positionen ohne Standortwechsel erreicht werden müssen.
03 Was bedeutet pendelfreie Lastführung?
Pendelfreie Lastführung heißt: Die Last kann nicht schwingen oder unkontrolliert ausschlagen, wie es bei Seil- oder Kettensystemen vorkommt. Über die starre Mechanik des Gelenkarms wird die Last jederzeit fest geführt — entscheidend für millimetergenaue Positionierung und maximale Arbeitssicherheit.
04 Welche Montagevarianten gibt es?
Der Gelenkarm-Manipulator ist in vier Varianten verfügbar: bodenstationär, deckenstationär, bodenverfahrbar oder deckenverfahrbar. Die Wahl richtet sich nach Kundenanforderung, Hallenhöhe, Bodenfläche und gewünschter Mobilität, flexibel an Ihr Layout anpassbar.
05 Welche Branchen profitieren am stärksten?
Der Gelenkarm-Manipulator wird vorrangig in Automotive eingesetzt — typische Anwendungen sind Karosseriebau und Endmontage. Weitere Branchen sind Gießerei, Glas- und Fensterindustrie sowie Sondermaschinenbau, überall dort, wo schwere oder unhandliche Bauteile präzise gehandhabt werden müssen.
06 Wie wird der Gelenkarm-Manipulator angetrieben?
Der Standard-Antrieb ist pneumatisch, ein bewährtes, robustes Konzept für industrielle Dauereinsätze. Druckluft ist in den meisten Produktionsumgebungen bereits verfügbar, was die Integration vereinfacht. Pneumatische Steuerungen bieten zudem feinfühlige Bedienung bei hoher Kraftübertragung. Weitere Antriebsoptionen sind jederzeit möglich.
07 Können wir den Gelenkarm-Manipulator individuell anpassen lassen?
Ja. Jeder Gelenkarm-Manipulator wird projektspezifisch konfiguriert: Tragkraft, Arbeitsradius, Montagevariante und Vorrichtung werden auf eure Anwendung abgestimmt. Vorrichtungen wie Greifer, Sauger, Magnete oder kundenspezifische Sonderlösungen entwickeln wir aus einer Hand — inklusive Vorabnahme im Showroom Holzkirchen.
08 Welche Montagevariante des Gelenkarm-Manipulators ist die richtige für meine Halle?
Die Wahl hängt von Bodenfläche, Hallenhöhe und gewünschter Mobilität ab. Die bodenstationäre Variante ist die wirtschaftlichste Lösung für feste Arbeitsplätze. Die bodenverfahrbare Variante lässt sich per Stapler umsetzen, ohne Eingriff in die Decke. Die deckenstationäre Variante hält den Boden frei. Die deckenverfahrbare Variante deckt über ein Schienensystem die gesamte Halle ab. Die Tragfähigkeit von 800 kg bleibt bei allen Varianten gleich.
09 Worin unterscheidet sich der Gelenkarm-Manipulator vom Seil-Manipulator?
Der Gelenkarm-Manipulator führt die Last über eine starre Mechanik und nimmt auch Drehmomente und außermittige Lasten auf. Er trägt bis 800 kg. Der Seil-Manipulator führt die Last über zwei Drahtseile, ist leichter und schneller, eignet sich aber für geringere Lasten bis 150 kg. Für schwere oder sperrige Bauteile mit definierter Lage ist der Gelenkarm-Manipulator die richtige Wahl, für schnelles Handling mittlerer Lasten der Seil-Manipulator.